重定位
打开RVIZ2,查看机器人在地图内的为位置是否与真实环境中的位置对应,如果不对需要重定位

楼层-单层
点击菜单栏中的“2D Pose Estimate”
按住鼠标左键,拖动鼠标(出现的绿色箭头为机器人朝向)
松开鼠标左键,使其重新定位

楼层-多层
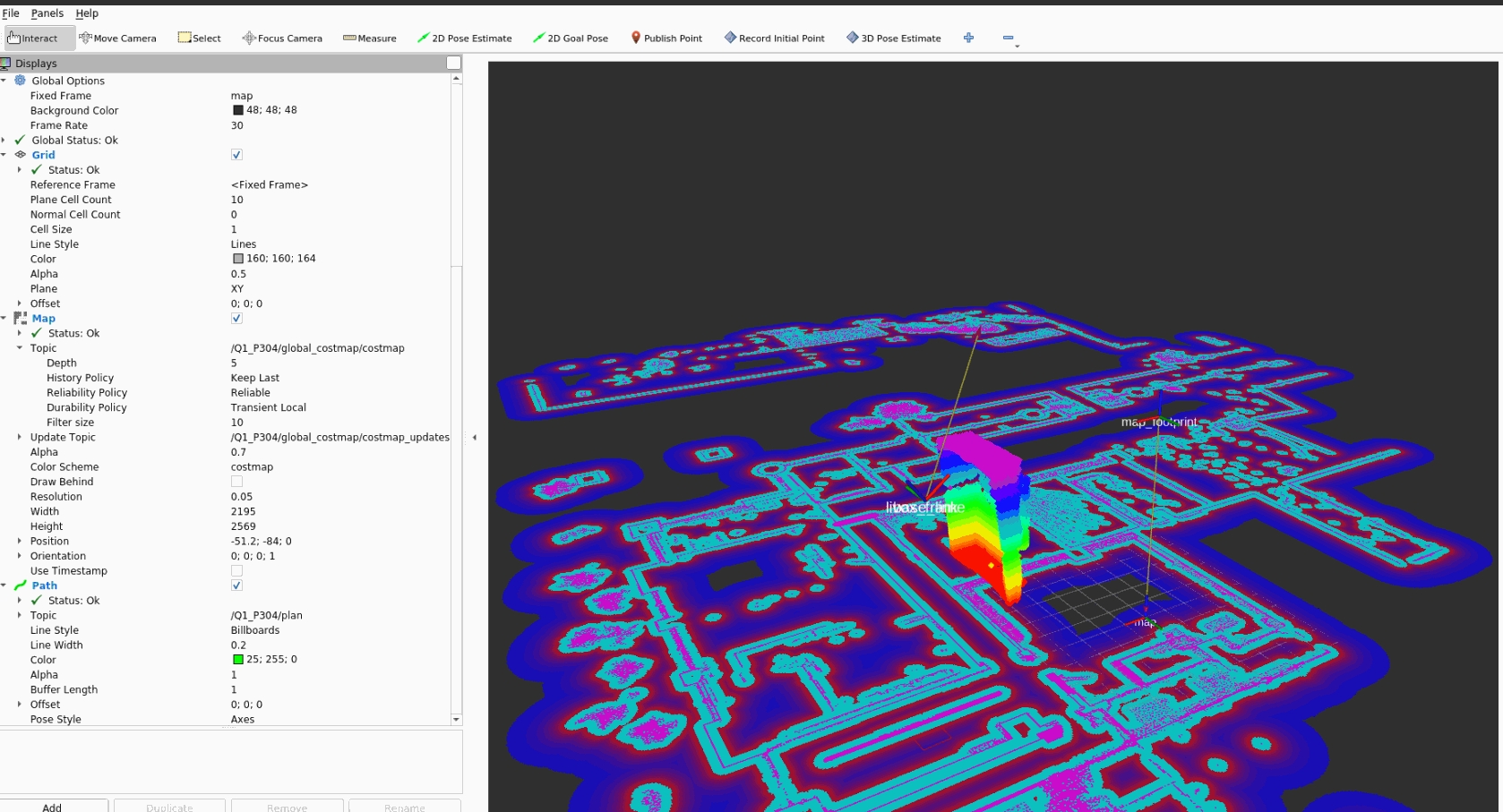
打开RVIZ2 界面右边栏Type 选择为XYOrbit(rviz_default_plugins)

打开RVIZ2 点击 3D Pose Estimate
按住鼠标左键,同时按住鼠标右键,向上拖动鼠标(绿色箭头叠加为机器人高度)
坐标线段颜色
说明
红色
x轴,机器人头朝向参照
绿色
y轴
蓝色
z轴
最后更新于