说明
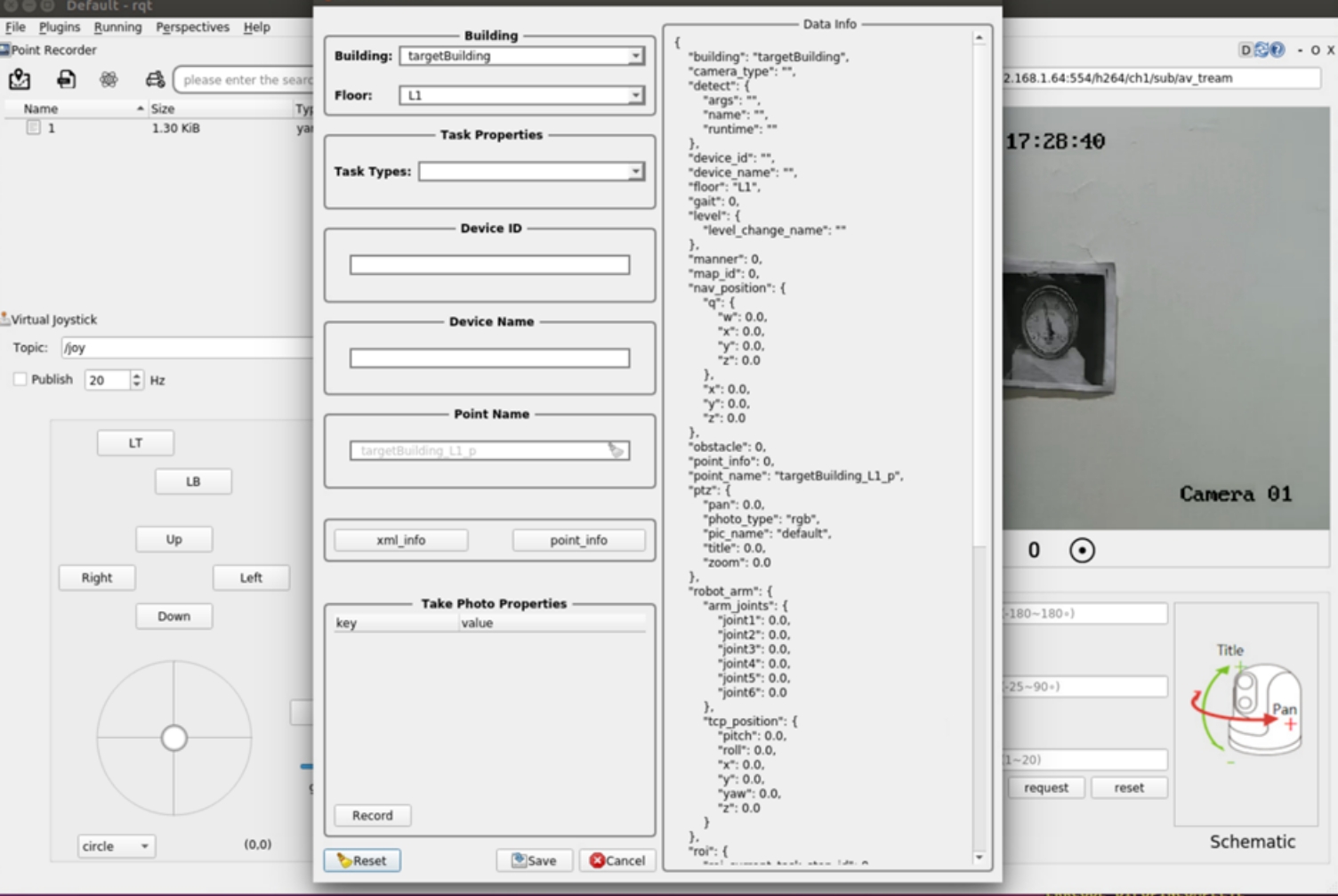
点击新增点位按钮
名称
说明
作用说明
Building
建筑物地图
确定需要采点的地图
Floor
楼层
确定需要采点地图的楼层
Task Types
任务类型
点位的类型选择
Device ID
点位ID
仅支持数字
Device Name
点位名称
支持数字+字母
xml_info
五级目录入口
选择当前点位对应的五级目录
point_info
点位类型入口
设置当前点位的属性
任务类型:
名称
解释
作用说明
巡视系统展示
waypoint
过渡
除充电点之外,不执行任务的点位,都归类为过度点
否
charge
充电
机器人充电所在位置
否
take_ptz_photo
拍照
红外拍照类型任务
是
find_roi
云台引导
需要精准拍照
是
level_change
地图切换
多用于上下楼,需要切换地图 等
否
door
门
用于开关自动门
否
xml_info

名称
说明
作用说明
一级目录
最高层级目录
用于巡视系统点位展示
二级目录
一级目录的子集
用于巡视系统点位展示
三级目录
二级目录的子集
用于巡视系统点位展示
四级目录
三级目录的子集
用于巡视系统点位展示
类型
执行任务的主体
robot,fly
point_info

名称
说明
作用说明
gait
设置机器人步态
普通步态,普通楼梯步态,斜坡步态,匍匐步态
speed
设置机器人速度
低速,普通,高速
manner
设置机器人正/逆走
正走,逆走
obs_mode
避障模式选择
开启避障,关闭避障
nav_mode
导航模式选择
直线导航
point_info
点位类型
过渡点,任务点,充电准备点,充电点
map_id
地图ID
0
最后更新于