X30
前置条件
确认机器人电量超过50%
机器人爬楼过程中,不可中断,不可将机器人切换为站立
机器人爬楼过程中,滑倒趴下,此时,需要人工将机器人搬至平整地面再控制机器人站立
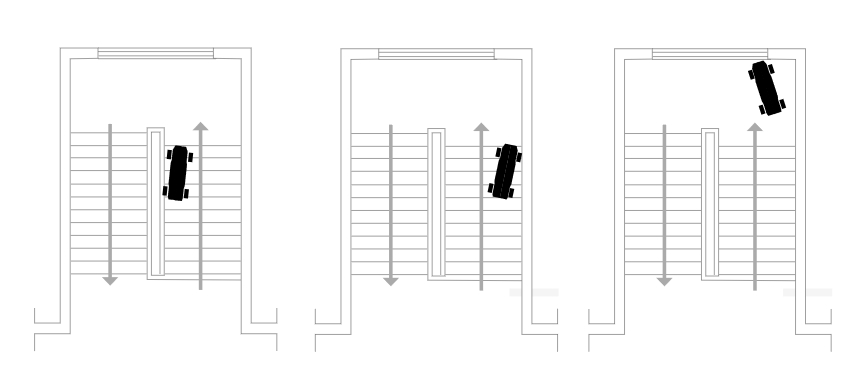
采集楼梯点(上楼)
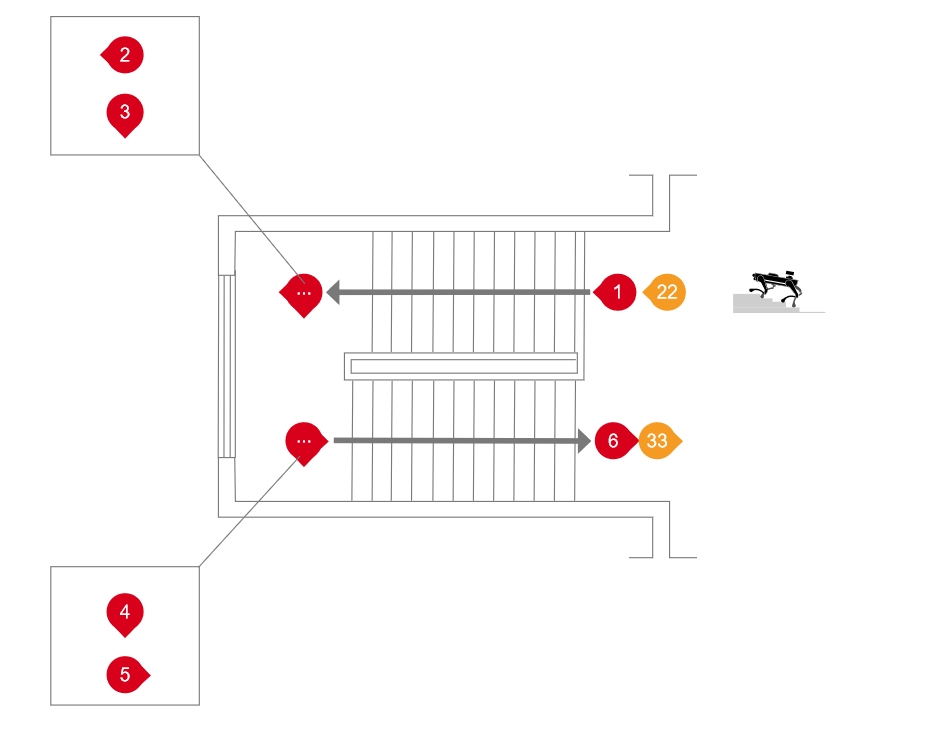
22
准备上楼点
RQT 【level_change,确定点位与所在实际楼层保持一致】
1
上下楼梯点
命令
2
上下楼梯点
命令
3
上下楼梯点
命令
4
上下楼梯点
命令
5
上下楼梯点
命令
6
上下楼梯点
命令
33
结束上楼点
RQT 【level_change,确定点位与所在实际楼层保持一致】
准备工作:

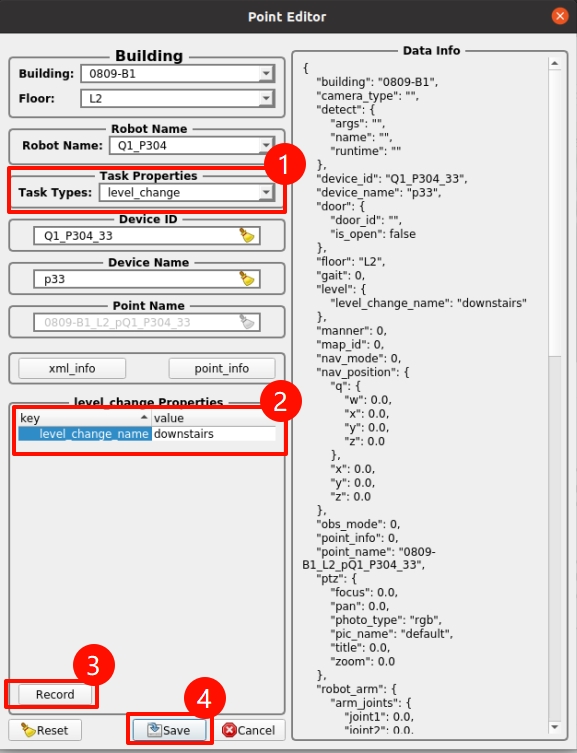
RQT 采点
采集“机器人上楼采点示意”图所示22号点

命令采点
进入容器
采集“机器人上楼采点示意”图所示1号点
ROBOT_NAME需要换成现场机器人的名字(在.env中查看)
采集“机器人上楼采点示意”图所示2号点
采集“机器人上楼采点示意”图所示3号点
采集“机器人上楼采点示意”图所示4号点
采集“机器人上楼采点示意”图所示5号点
采集“机器人上楼采点示意”图所示6号点
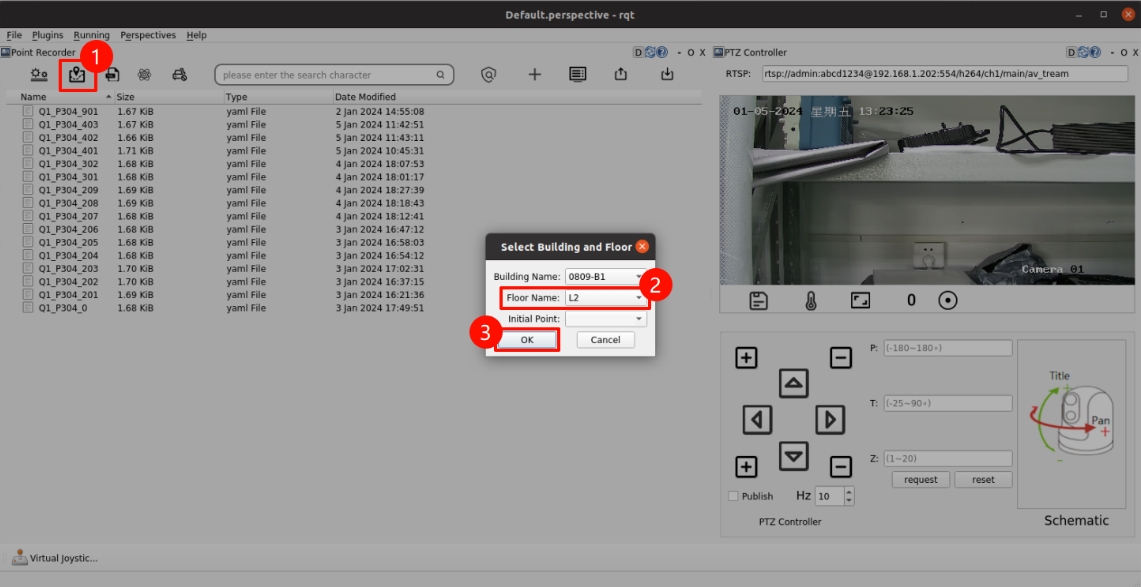
切换地图信息
上楼梯时floor name(如果从1层到2层则填L2)
map_name: '地图所在文件夹名称'
RQT采点
采集“机器人上楼采点示意”图所示33号点
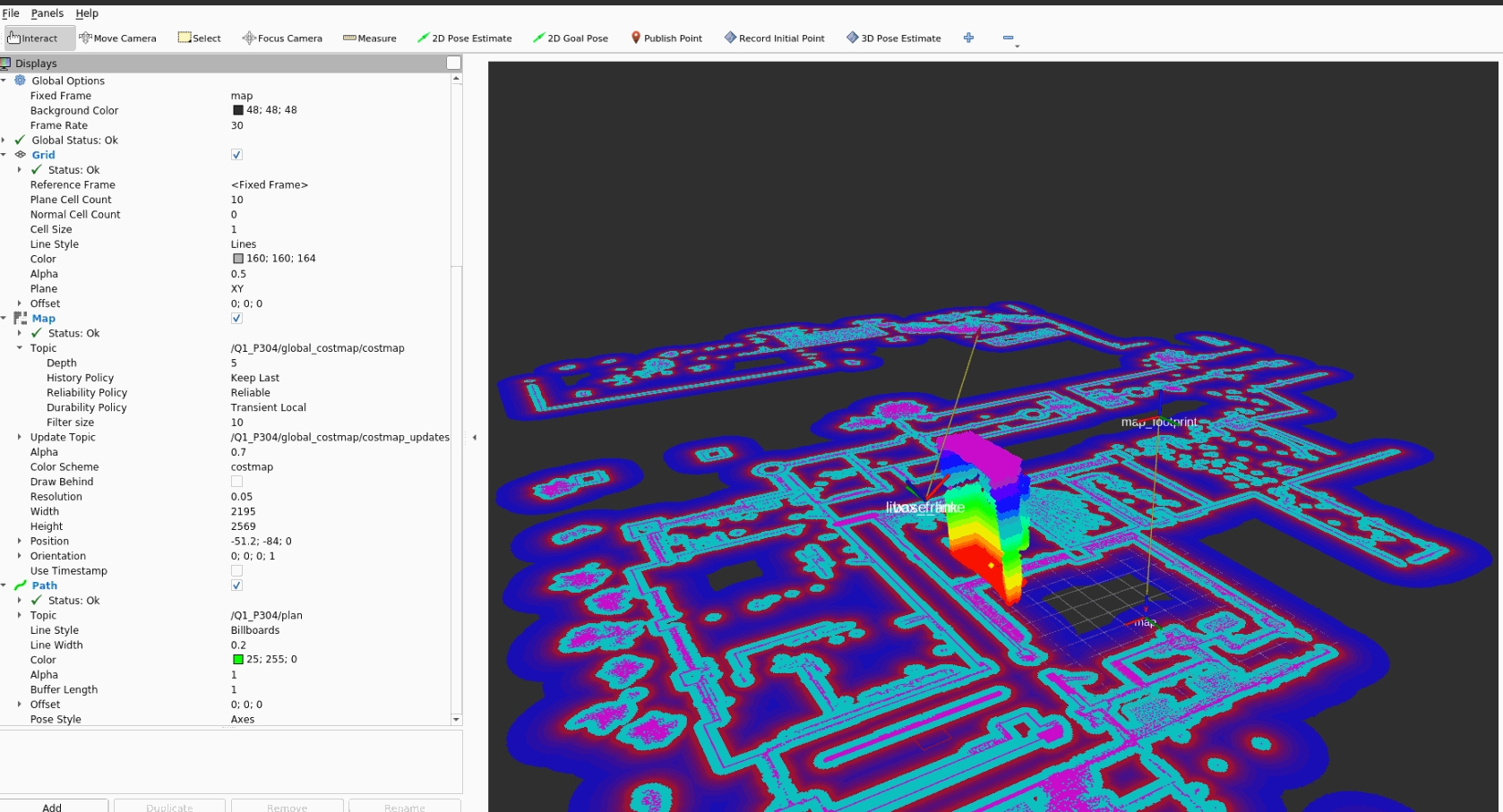
重定位
打开RVIZ2 点击 3D Pose Estimate
按住鼠标左键,拖动鼠标(绿色箭头为机器人朝向)
按住鼠标左键,同时按住鼠标右键,向上拖动鼠标(绿色箭头叠加为机器人高度)
采集“机器人上楼采点示意”图所示33号点
验证
下楼验证
确认机器人“机器人上楼采点示意”图所示33号点附近
输入下楼指令
上楼验证
确认机器人“机器人上楼采点示意”图所示22号点附近
输入上楼指令
注意事项
机器人爬楼异常
如上图,机器人自动爬楼过程中出现,左偏,右偏,撞墙等问题

1
立即将遥控器切换至【手动】
2
拨动遥感,使其回到楼梯中间,并遥控机器人到平整地区
在L2重启了机器人
如果在L2重启了机器人
打开RQT 切换楼层

重定位
打开RVIZ2 点击 3D Pose Estimate
按住鼠标左键,同时按住鼠标右键,向上拖动鼠标(绿色箭头叠加为机器人高度)

最后更新于