单点多任务
新建第一个任务点
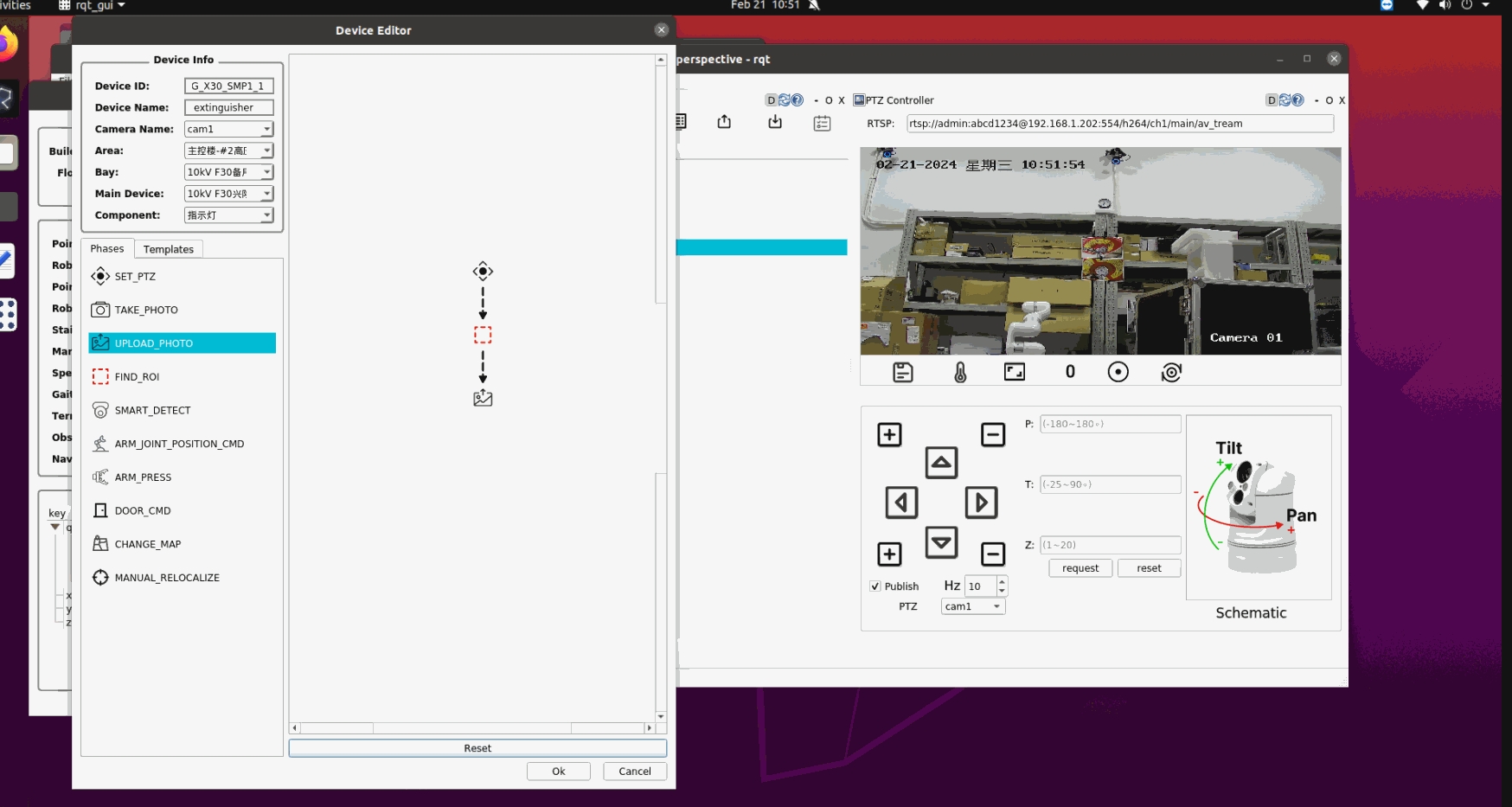
勾选云台控制处的publish

首先转动云台至发现目标物,之后,按住鼠标左键框选目标物,松开鼠标,使目标物居中显示在预览画面中

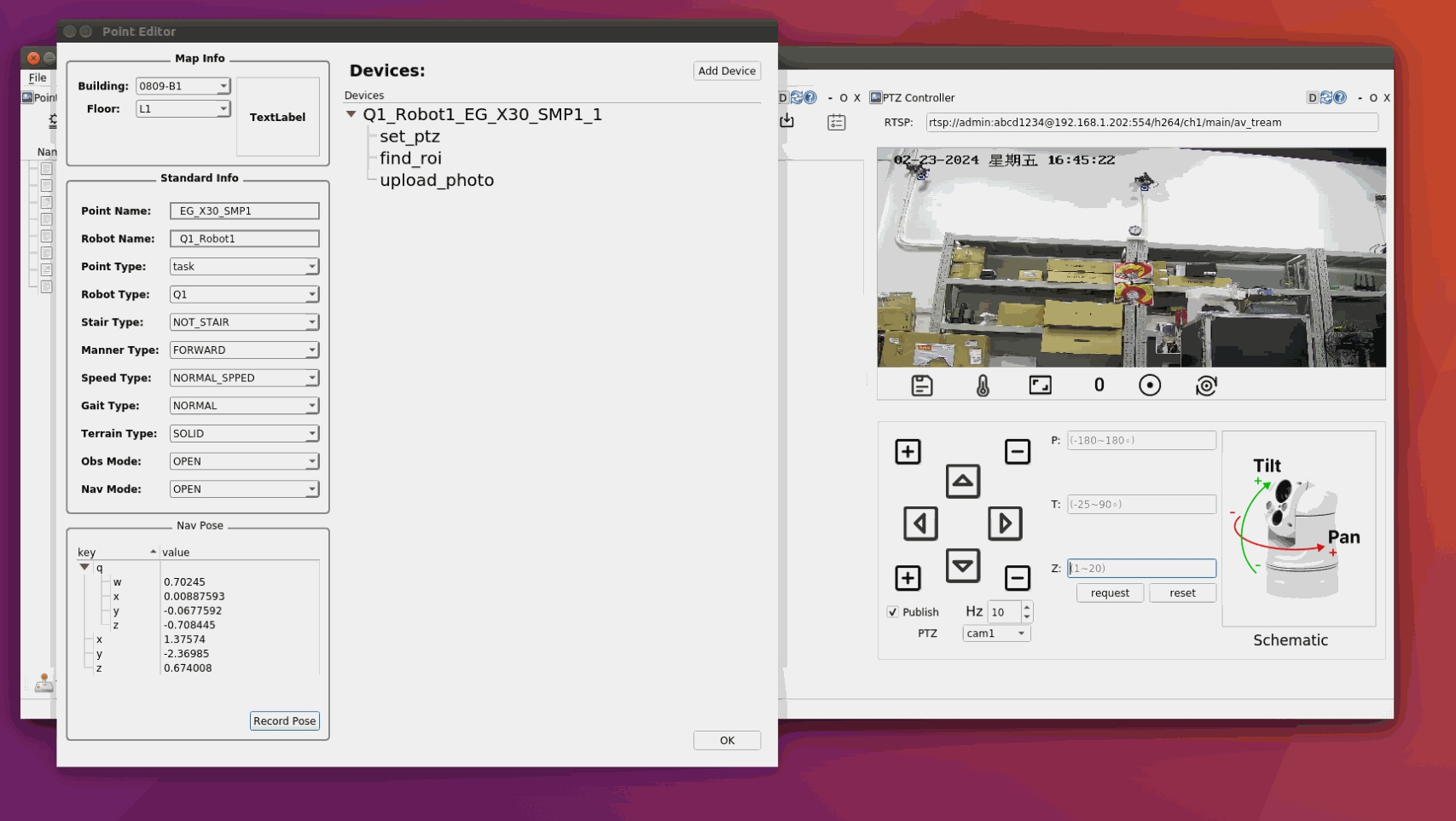
点击“新增点位”按钮增加点位,并点击“Record Pose”按钮,记录机器人位置

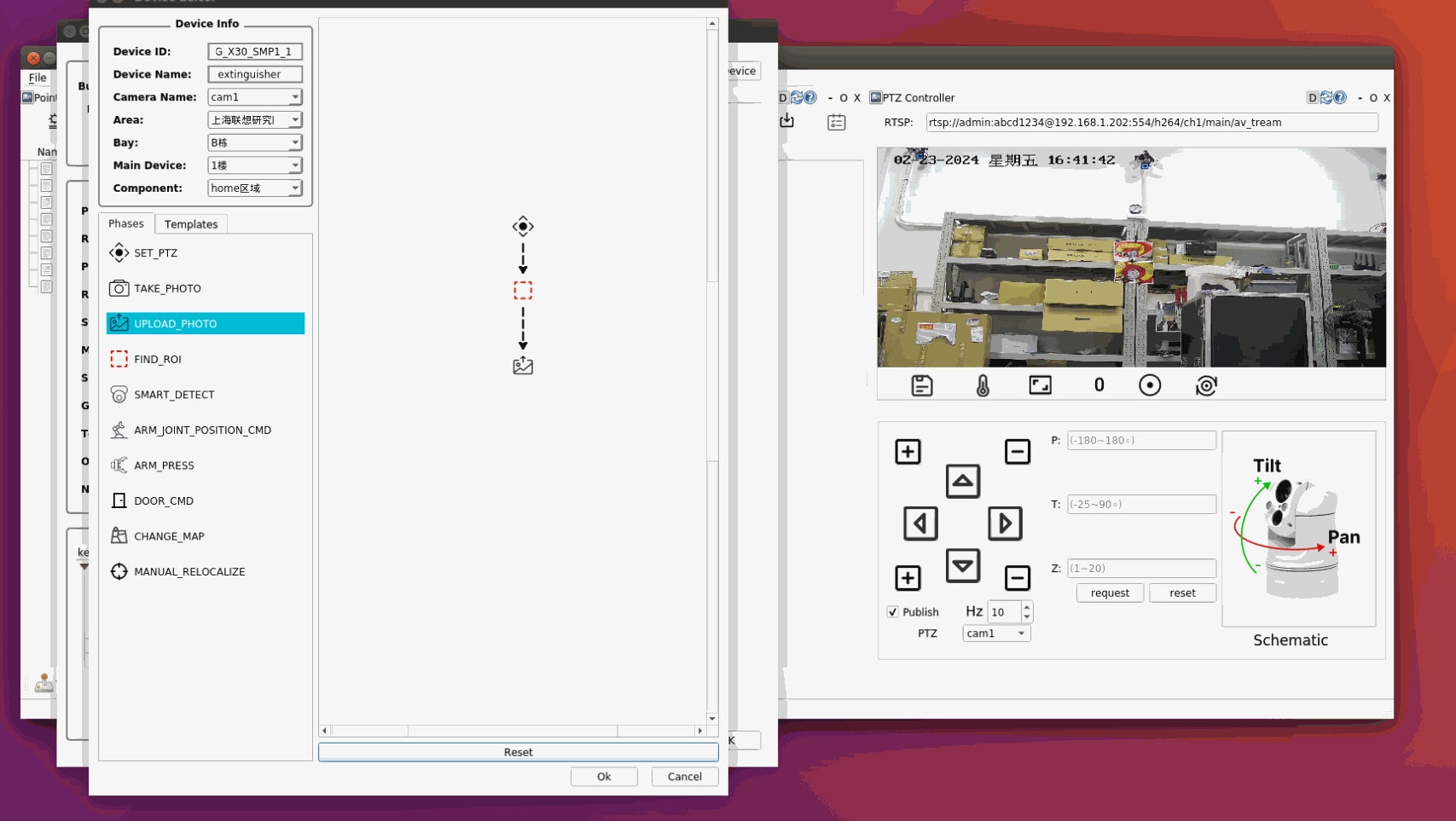
点击“ADD DEVICE”按钮增加该点位的一个任务,填好device name,并拖入需要的“phases”

放大,调整到目标zoom。同时,要按住鼠标左键框选目标物,松开鼠标,使目标物居中显示在预览画面中。(记住放大后的zoom,后面第9步要用到!)
goal_zoom 目标zoom
initial_zoom 初始zoom
goal_zoom > 15
10
15 ≥ goal_zoom > 10
goal_zoom-5
9
6 ≥ initial_zoom ≥ 3
8
5 ≥ initial_zoom ≥ 3
7 ≥ goal_zoom ≥ 6
4 ≥ initial_zoom ≥ 3
5 ≥ goal_zoom ≥ 4
3 ≥ initial_zoom ≥ 2
3
2 ≥ initial_zoom ≥ 1
2 ≥ goal_zoom ≥ 1
1
缩小,调整到初始zoom

记录PTZ数值,1)双击PTZ图标,2)点击record 记录,3)点击OK按钮完成记录
记录标准图中目标物位置信息:按住鼠标右键,框选目标物
放大图像至第5步中的目标zoom
记录FIND_ROI目标图需要的数值,1)双击FIND_ROI图标,2)点击record 记录,3)点击OK按钮完成记录

点击Device Editor 窗口内的OK 按钮保存任务详情
新建第二个任务点
最后更新于